lagrangian dynamics of a somersaulter in mathematica
programming skills
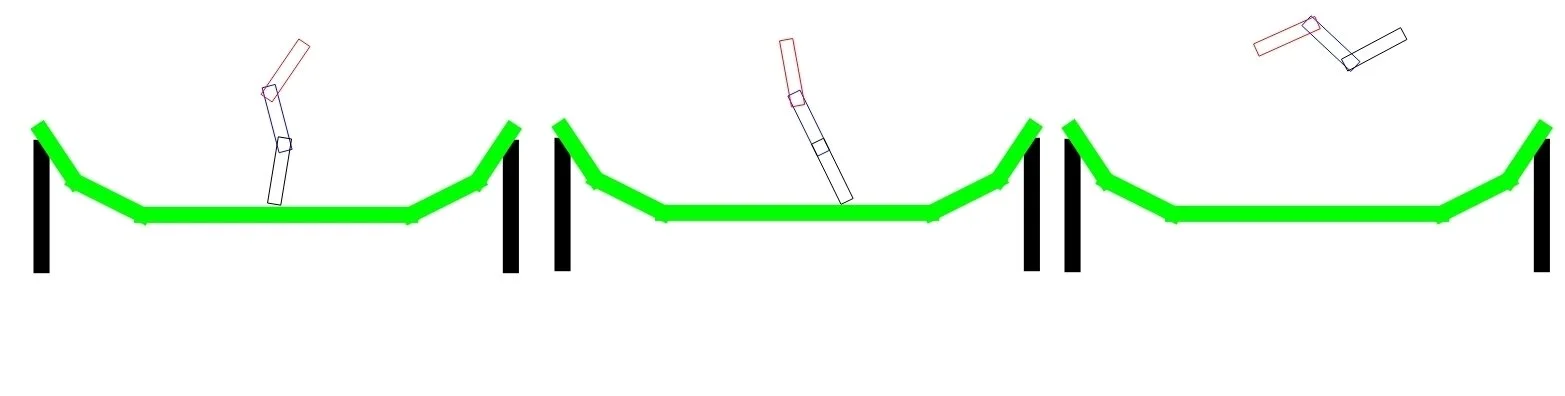
For the final project of ME 314: Theory of Machine Dynamics, we had to simulate dynamics of a system in Mathematica. I chose to simulate a person doing a backward somersault on a trampoline.
This Mathematica simulation demonstrates the motion of a person doing a backward somersault on a trampoline. The simulation is in two dimensions, and since the problem is quite complex, the human body is represented by three links in the simulation. The red link represents the upper body, the blue link represents the upper leg section, and the blue link represents the lower leg section of the body. The trampoline is the green structure at the bottom of the image. The GitHub repository for the project can be found here.